电 话:0572-6261601
传 真:0572-6261602
联系人手机:15384087771
网 址:www.norsm.com
邮箱:chenyangyang@norsm.com
地 址:浙江省湖州市长兴国家大学科技园二分部
模块化和分层控制器软件系统。该软件系统基于开源实时多任务操作系统Linux。分层和模块化的结构设计用于完成软件系统的开放性。南宁真空吸盘整个控制器软件系统分为硬件驱动程序层,核心层和使用层。开放的模块化控制系统架构,采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光敏电阻I/O控制板,传感器处理板和编程示教盒等。南宁真空吸盘机器人操纵器(RC)和编程示教盒通过串行端口/CAN总线进行通信。当前对机器人的使用是从单个机器人站到机器人生产线进行的。

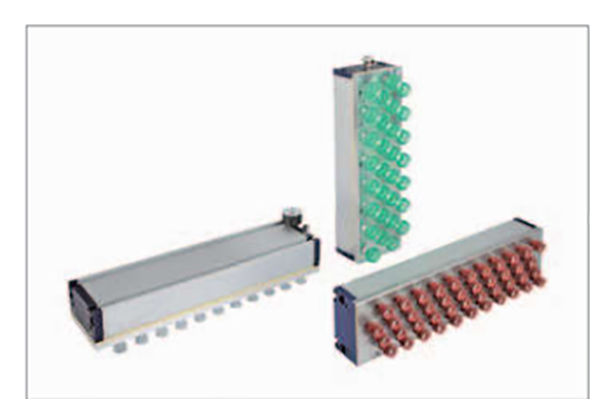
真空吸盘也称为真空吊索。一般来说,使用真空吸盘抓取产品是合算的方法。有各种类型的真空吸盘。橡胶制成的吸盘可以在高温下运行。由硅橡胶制成的吸盘非常适合抓握粗糙表面的产品。聚氨酯制成的南宁真空吸盘非常耐用。另外,如果在实际生产中要求吸盘具有耐油性,则可以考虑使用诸如聚氨酯,丁腈橡胶或含乙烯基的聚合物的材料来制造南宁真空吸盘。通常,为了避免刮擦产品表面,选择带有丁腈橡胶或硅橡胶制成的波纹管的吸盘。

垂直结构的进气口和排气口水平设置,并且管道的组装和连接相对方便。但是,南宁真空吸盘的重心较高,高速时稳定性较差,因此这种类型主要用于小型泵。卧式泵的进口在顶部,排气在底部。有时,为了便于真空系统管道的安装和连接,可以从水平方向连接排气口,即,进气方向和排气方向相互垂直。此时,排气口可以从左右两个方向打开。除了一端连接到排气管外,另一端被阻塞或连接到旁通阀。该南宁真空吸盘的重心低,在高速下具有良好的稳定性。通常,大中型泵都采用这种结构。

由于粗糙的低真空气体系统无法完全密封,因此始终存在泄漏。在这种情况下,南宁真空吸盘的流量越大,泄漏的比例越小,并且越有利于保持吸附真空系统的真空度,从而获得更大的吸附力。同时,较大的流量也可以实现更快的真空吸附反应时间。例如,如果两个泵的极限真空度相同,则A真空泵的流量为1L/min,B真空泵的流量为20L/min。首先,两个南宁真空吸盘之间的抽速差异很大,因此它们达到预定真空所需的时间不同。

协作码垛机器人已经成为工业机器人的重要方向。在未来的制造业中,机器人将需要与人合作,以更好地完成一些复杂的工作任务。但是,对南宁真空吸盘的要求高于传统机器人。协作机器人具有三大安全功能:第一是触摸停止功能。当南宁真空吸盘与人或其他外部物体接触时感到触摸力时,机器人会自动停止。第二个是避免让步功能。释放人员和其他设备的工作空间。第三个是触控功能。按下机器时,它可以自动后退以确保手不会被挤压或受伤。