电 话:0572-6261601
传 真:0572-6261602
联系人手机:15384087771
网 址:www.norsm.com
邮箱:chenyangyang@norsm.com
地 址:浙江省湖州市长兴国家大学科技园二分部

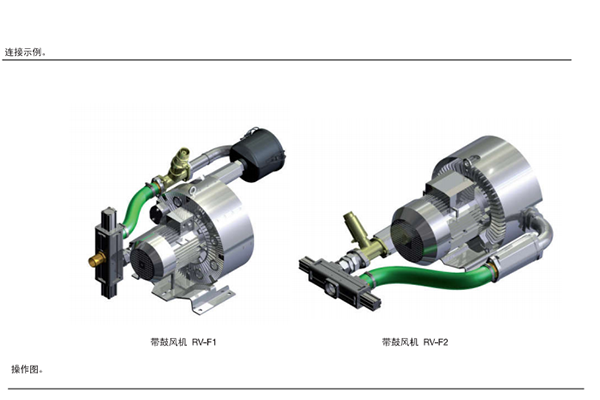
真空吸盘利用真空泵将橡胶吸盘中的空气抽出,在腔体内形成真空,从而实现物体的吸附。卸货时,管道通向大气,失去真空,降低物体。该方法具有大的真空度和可靠的吸附,但是真空泵系统的成本很高。1.电机2.真空泵3.电磁阀4.电磁阀5.吸盘6.空气,工作原理:拾取物体时,南京气动真空吸盘5与物体表面接触,单头电磁阀3通电并切换到左侧位置,单头电磁阀4断电。抽出南京气动真空吸盘内腔及其管道中的空气以形成真空以吸引物体。释放物体时,单头阀3断电并切换到正确位置。

真空吸附力的估算主要基于压力公式,即:F=PS。在真空吸附应用中,将稍微调整计算方法,如下所示:F≈(101-P)×S吸盘面积×10-2公式中,F为南京气动真空吸盘产生的理论吸附力,单位为千克力(Kgf);P是真空泵应用中达到的真空度,单位为千帕斯卡(KPa);101是标准大气压值,因此在某些特殊海拔区域需要根据情况进行调整;S吸盘面积:是南京气动真空吸盘的有效面积,单位为平方厘米(cm2)。例如,通过真空泵,真空吸盘可以达到10kPa的真空度,那么它与大气压之间的压力差为101-10=91kPa。
1.极限真空(通常称为真空度):将真空泵连接到检测容器,待测气体放入后,继续抽空很长时间。当容器中的气压不再下降并保持一定值时,该压力称为泵的极限真空。该值越小,越接近理论真空度。普通南京气动真空吸盘测得的真空值(即表压)是相对真空度,用负数表示,是指测得的气压与大气压之间的差。2.抽气速率:每单位时间流经真空泵吸入口的气体量。传统工业南京气动真空吸盘的体积通常非常大,并且该泵需要特殊的真空泵油和润滑油。中等的气体将包含大量的油雾。

协作码垛机器人已经成为工业机器人的重要方向。在未来的制造业中,机器人将需要与人合作,以更好地完成一些复杂的工作任务。但是,对南京气动真空吸盘的要求高于传统机器人。协作机器人具有三大安全功能:第一是触摸停止功能。当南京气动真空吸盘与人或其他外部物体接触时感到触摸力时,机器人会自动停止。第二个是避免让步功能。释放人员和其他设备的工作空间。第三个是触控功能。按下机器时,它可以自动后退以确保手不会被挤压或受伤。