电 话:0572-6261601
传 真:0572-6261602
联系人手机:15384087771
网 址:www.norsm.com
邮箱:chenyangyang@norsm.com
地 址:浙江省湖州市长兴国家大学科技园二分部

模块化和分层控制器软件系统。该软件系统基于开源实时多任务操作系统Linux。分层和模块化的结构设计用于完成软件系统的开放性。绍兴真空夹具整个控制器软件系统分为硬件驱动程序层,核心层和使用层。开放的模块化控制系统架构,采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光敏电阻I/O控制板,传感器处理板和编程示教盒等。绍兴真空夹具机器人操纵器(RC)和编程示教盒通过串行端口/CAN总线进行通信。当前对机器人的使用是从单个机器人站到机器人生产线进行的。
真空吸附力的估算主要基于压力公式,即:F=PS。在真空吸附应用中,将稍微调整计算方法,如下所示:F≈(101-P)×S吸盘面积×10-2公式中,F为绍兴真空夹具产生的理论吸附力,单位为千克力(Kgf);P是真空泵应用中达到的真空度,单位为千帕斯卡(KPa);101是标准大气压值,因此在某些特殊海拔区域需要根据情况进行调整;S吸盘面积:是绍兴真空夹具的有效面积,单位为平方厘米(cm2)。例如,通过真空泵,真空吸盘可以达到10kPa的真空度,那么它与大气压之间的压力差为101-10=91kPa。

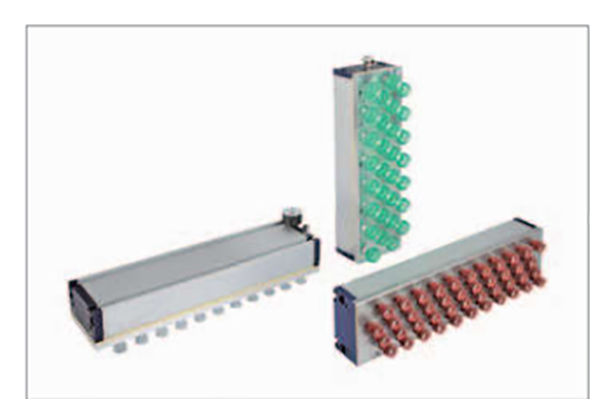
真空吸盘用于通过真空压力吸附和夹持板。板的表面是相对平坦的,并且吸盘的唇缘是相对柔软和薄的,并且可以附接到板上。真空泵抽真空,吸盘的内腔产生真空,形成真空负压。绍兴真空夹具的吸力与压力(真空度,吸盘内外之间的气压差)和吸盘面积成正比,即真空度越高,吸力越大吸力卡盘的尺寸越大,吸力越大。绍兴真空夹具动态下的吸力安全性,根据国外专业真空公司测试的数据,传统电动葫芦产生的加速系数要求的安全系数是真空压力的2倍。

1、结构简单、零部件少。因此零部件的故障率低、性能可靠、保养维修简单。2、占地面积少。有利于客户厂房中生产线的布置,并可留出较大的库房面积。绍兴真空夹具可以设置在狭窄的空间,即可有效的使用。3、适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变化时只需在触摸屏上稍做修改即可,不会影响客户的正常的生产。4、绍兴真空夹具能耗低。通常机械式的码垛机的功率在26KW左右,而码垛机器人的功率为5KW左右。
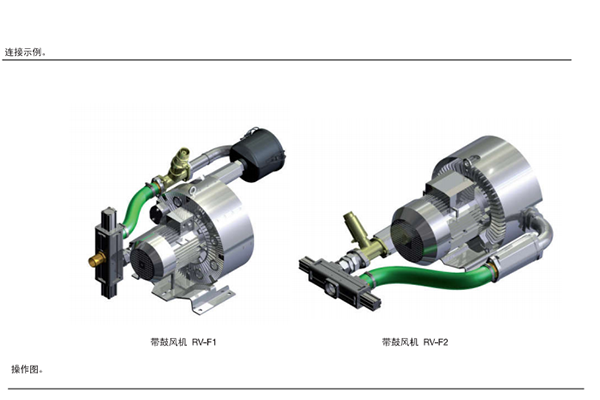
1.极限真空(通常称为真空度):将真空泵连接到检测容器,待测气体放入后,继续抽空很长时间。当容器中的气压不再下降并保持一定值时,该压力称为泵的极限真空。该值越小,越接近理论真空度。普通绍兴真空夹具测得的真空值(即表压)是相对真空度,用负数表示,是指测得的气压与大气压之间的差。2.抽气速率:每单位时间流经真空泵吸入口的气体量。传统工业绍兴真空夹具的体积通常非常大,并且该泵需要特殊的真空泵油和润滑油。中等的气体将包含大量的油雾。
首先,结构简单,零件数量少,故障率低。第二,占地面积小。有利于将生产线放置在客户的工厂中,并可以留下较大的仓库面积。绍兴真空夹具可以在狭窄的空间中使用,这很有用。第三,适用性强。当客户产品的尺寸,体积,形状和托盘的外部尺寸发生变化时,只需在触摸屏上稍作校正,就不会影响客户的正常生产。机械码垛机不能费力地更换。第四,能耗低。普通机械码垛机的功率为26KW,而绍兴真空夹具的功率为5KW。大大降低了客户的运营成本。