电 话:0572-6261601
传 真:0572-6261602
联系人手机:15384087771
网 址:www.norsm.com
邮箱:chenyangyang@norsm.com
地 址:浙江省湖州市长兴国家大学科技园二分部

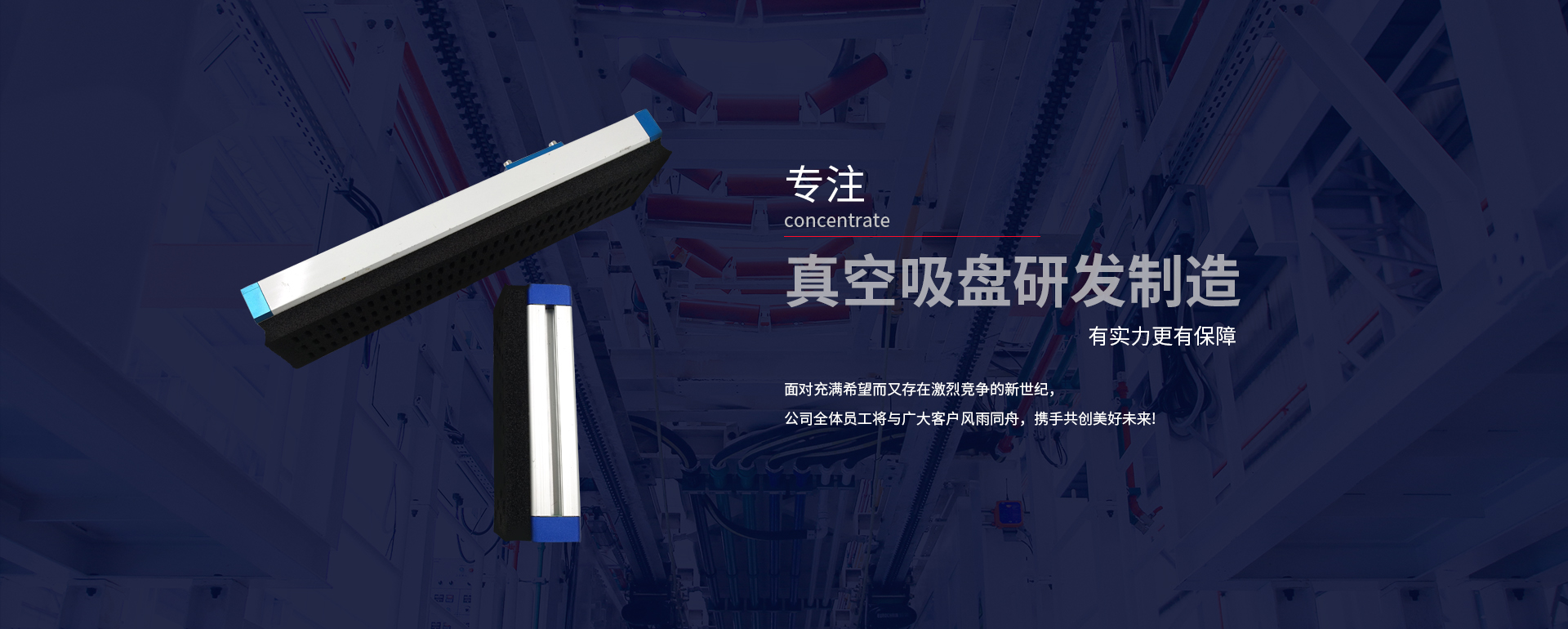
理论安全吸力是指吸盘未老化,未硬化,吸盘未破损,开裂,吸盘表面清洁,板面质量相对较好的情况。吸盘的唇缘更适合木板表面,空气泄漏少,真空度可达到60%以上。因此,为确保安全使用真空吸尘系统加载,请注意:请务必定期清洁合肥真空吸具的唇面(与吸盘接触的一面),并检查吸盘是否有刮擦,裂纹和老化。如有必要,请立即用新的合肥真空吸具更换。实际上,许多公司使用的吸盘并不安全,并且存在潜在的安全隐患。

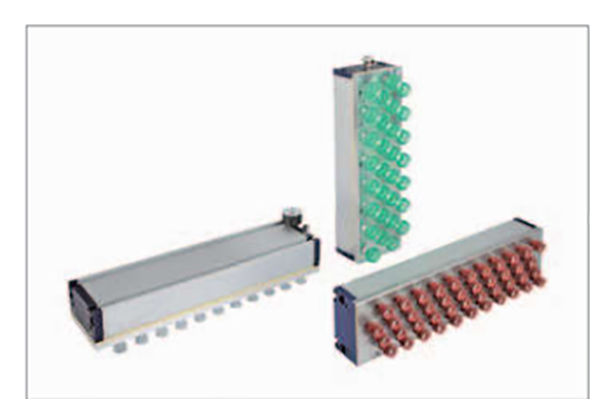
垂直结构的进气口和排气口水平设置,并且管道的组装和连接相对方便。但是,合肥真空吸具的重心较高,高速时稳定性较差,因此这种类型主要用于小型泵。卧式泵的进口在顶部,排气在底部。有时,为了便于真空系统管道的安装和连接,可以从水平方向连接排气口,即,进气方向和排气方向相互垂直。此时,排气口可以从左右两个方向打开。除了一端连接到排气管外,另一端被阻塞或连接到旁通阀。该合肥真空吸具的重心低,在高速下具有良好的稳定性。通常,大中型泵都采用这种结构。

真空吸盘用于通过真空压力吸附和夹持板。板的表面是相对平坦的,并且吸盘的唇缘是相对柔软和薄的,并且可以附接到板上。真空泵抽真空,吸盘的内腔产生真空,形成真空负压。合肥真空吸具的吸力与压力(真空度,吸盘内外之间的气压差)和吸盘面积成正比,即真空度越高,吸力越大吸力卡盘的尺寸越大,吸力越大。合肥真空吸具动态下的吸力安全性,根据国外专业真空公司测试的数据,传统电动葫芦产生的加速系数要求的安全系数是真空压力的2倍。
机器人视觉在工业机器人中的应用已经非常普遍。根据钱辉的说法,工业机器人视觉分为三种类型:二维视觉,立体3D视觉和使用广域传感器技术的3D视觉。技术使合肥真空吸具能够识别物体的位置,大小和颜色,包括存储在空间中的位置,并且合肥真空吸具已经具备了感知周转环境的能力。借助3D视觉,该机器人的功能得到了进一步扩展,可以拾取凌乱的工件,从而无需工人在装配线上组织工件。具有视觉的机器人可以快速检测现有工件,然后确定其位置。